

ปัจจัยสำคัญในการเลือกชุดกล้องสำหรับ Optical MoCap Marker-based
TL;DR | ในการเลือกชุดกล้อง Optical MoCap Marker-based เพื่อให้ได้ข้อมูล 3 มิติที่แม่นยำ ต้องพิจารณาปัจจัยหลัก ได้แก่ จำนวนกล้อง ที่ส่งผลต่อปริมาตรการจับภาพและการลดการบดบัง ความละเอียดของกล้อง ซึ่งสำคัญต่อความแม่นยำในการระบุตำแหน่งมาร์กเกอร์และคุณภาพข้อมูล Kinematics อัตราการจับภาพ (Frame Rate) ที่จำเป็นต่อการจับการเคลื่อนไหวที่รวดเร็วและซับซ้อน ลดภาพเบลอ และป้องกันการสับสนของมาร์กเกอร์ และสุดท้ายคือ การวางแผนการจัดวางกล้องอย่างเหมาะสม ซึ่งเป็นกุญแจสำคัญในการเพิ่มประสิทธิภาพการจับภาพโดยรวม การพิจารณาปัจจัยเหล่านี้อย่างรอบด้านจะช่วยให้ได้ระบบที่ตอบโจทย์ความต้องการและคุ้มค่ากับการลงทุน
MOTION CAPTURE SYSTEM
RAT
7/15/2025
ปัจจัยสำคัญในการเลือกชุดกล้องสำหรับ Optical MoCap Marker-based
ในการเลือกชุดกล้องสำหรับระบบจับการเคลื่อนไหวแบบใช้มาร์กเกอร์ (Optical MoCap Marker-based) ซึ่งเป็นเทคโนโลยีสำคัญในการแปลงการเคลื่อนไหวทางกายภาพให้เป็นข้อมูลดิจิทัลสามมิติในระดับ Gold standard นั้น มีปัจจัยสำคัญหลายประการที่ต้องพิจารณาอย่างรอบคอบ เพื่อให้ได้ข้อมูลที่แม่นยำและเชื่อถือได้สูงสุด ปัจจัยเหล่านี้รวมถึงจำนวนกล้อง ความละเอียดของกล้อง อัตราการจับภาพ และการจัดวางตำแหน่งของกล้องอย่างเหมาะสม
1. จำนวนกล้อง: ปริมาตรในการจับภาพ การจัดการเรื่องการบดบัง และการพิจารณาความคุ้มค่า
จำนวนกล้องที่ใช้ในระบบ Optical MoCap มีผลอย่างมากต่อขนาดของพื้นที่ที่สามารถจับภาพได้ (ปริมาตรในการจับภาพ) และความสามารถในการจัดการกับปัญหาการบดบังมาร์กเกอร์
ระบบ Optical MoCap อาศัยการประมาณตำแหน่งสามมิติของมาร์กเกอร์โดยการคำนวณแบบ การคำนวณแปบบสามเหลี่ยม (Triangulation) ซึ่งเป็นหลักการทางเรขาคณิตที่ใช้ข้อมูลจากกล้องอย่างน้อยสองตัวเพื่อระบุตำแหน่งของจุดในพื้นที่สามมิติ ในทางทฤษฎี กล้องเพียงสองตัวก็เพียงพอสำหรับการสร้างภาพ 3 มิติของมาร์กเกอร์ อย่างไรก็ตาม ระบบจับการเคลื่อนไหวแบบใช้มาร์กเกอร์มักถูกจำกัดด้วยปริมาตรในการจับภาพ การเพิ่มจำนวนกล้องช่วยขยายปริมาตรในการจับภาพของระบบโดยตรง ปริมาตรการจับภาพที่ใหญ่ขึ้นนี้มีประโยชน์มากสำหรับการเคลื่อนไหวที่รวดเร็วและซับซ้อน หรือเมื่อต้องการติดตามวัตถุหลายชิ้น การติดตั้งกล้องรอบพื้นที่การจับภาพในระดับความสูงที่เหมาะสมจะช่วยเพิ่มการครอบคลุมโดยรวมของกล้องและขยายขนาดปริมาตรการจับภาพให้กว้างที่สุด
การบดบัง (Occlusion) เป็นหนึ่งในปัญหาหลักที่สำคัญและแพร่หลายที่สุดในการจับภาพเคลื่อนไหว ซึ่งเกิดขึ้นเมื่อแนวการมองเห็นของกล้องถูกบดบังด้วยส่วนของร่างกาย วัตถุ หรือสิ่งแวดล้อม ทำให้ข้อมูลมาร์กเกอร์ขาดหายไปและลดความแม่นยำในการกำหนดตำแหน่ง 3 มิติ ปัญหานี้ยังเป็นการเพิ่มภาระงานในการจัดการข้อมูลและการประมวลผลภายหลังของผู้ใช้อีกด้วย การเพิ่มจำนวนกล้องจะช่วยลดโอกาสในการบดบังได้อย่างมาก การจัดให้มีมุมมองที่หลากหลายจะเพิ่มโอกาสที่มาร์กเกอร์ถูกมองเห็นได้ด้วยกล้องจำนวนขั้นต่ำที่จำเป็นสำหรับการสร้างภาพ 3 มิติได้ การจัดการการบดบังอย่างมีประสิทธิภาพนั้น ต้องอาศัยการจัดวางตำแหน่งของกล้องแต่ละตัวอย่างเหมาะสม
ผลตอบแทนที่ลดน้อยลง (Diminishing Returns) แม้ว่าการเพิ่มจำนวนกล้องจะช่วยลดข้อผิดพลาดในการบดบังและเพิ่มความแม่นยำได้ แต่การเพิ่มจำนวนกล้องมากเกินไป (เช่น มากกว่า 20 ตัว) จะเพิ่มความซับซ้อนและค่าใช้จ่ายอย่างมาก ซึ่งอาจนำไปสู่ "ผลตอบแทนที่ลดน้อยลง" นั่นหมายความว่า การลงทุนในกล้องเพิ่มเติมหลังจากจุดหนึ่งไปแล้ว อาจไม่ให้การปรับปรุงในด้านความแม่นยำหรือประสิทธิภาพที่คุ้มค่ากับการลงทุนที่เพิ่มขึ้น โดยเฉพาะอย่างยิ่งในด้านความละเอียดในการระบุตำแหน่งในพื้นที่จริง มีการศึกษาพบว่าผลตอบแทนลดลงอย่างมีนัยสำคัญเมื่อมีกล้องมากกว่าสามตัวสามารถมองเห็นมาร์เกอร์ได้ในเวลาเดียวกัน บ่งชี้ว่ากล้องสามตัวแรกมีความสำคัญอย่างยิ่งต่อความแม่นยำ ในขณะที่กล้องที่เพิ่มเข้ามาหลังจากนั้น (เช่น กล้องตัวที่ 4, 5, 6 ขึ้นไป) จะให้ประโยชน์หลักในการลดการบดบังและขยายปริมาตรการทำงานมากกว่าการเพิ่มความละเอียดในการระบุตำแหน่งในพื้นที่จริงโดยตรง
จำนวนกล้องที่พบบ่อยในระบบ Optical MoCap (Marker-based): ระบบ Optical MoCap สำหรับงาน Gait Analysis มีจำนวนกล้องอยู่ระหว่าง 4 ถึง 16 ตัว ซึ่งส่วนใหญ่ใช้กล้อง 8 ตัว (22%), 10 ตัว (23%) หรือ 12 ตัว (10%) (Abdullah, M. et al, 2024)
2. ความละเอียดของกล้อง: ความแม่นยำในการระบุตำแหน่งและคุณภาพข้อมูล
ความละเอียดของกล้องซึ่งกำหนดโดยจำนวนพิกเซลในตัวเซ็นเซอร์ มีผลโดยตรงต่อความสามารถของระบบในการตรวจจับและจับภาพมาร์กเกอร์ในรายละเอียดเล็กๆ
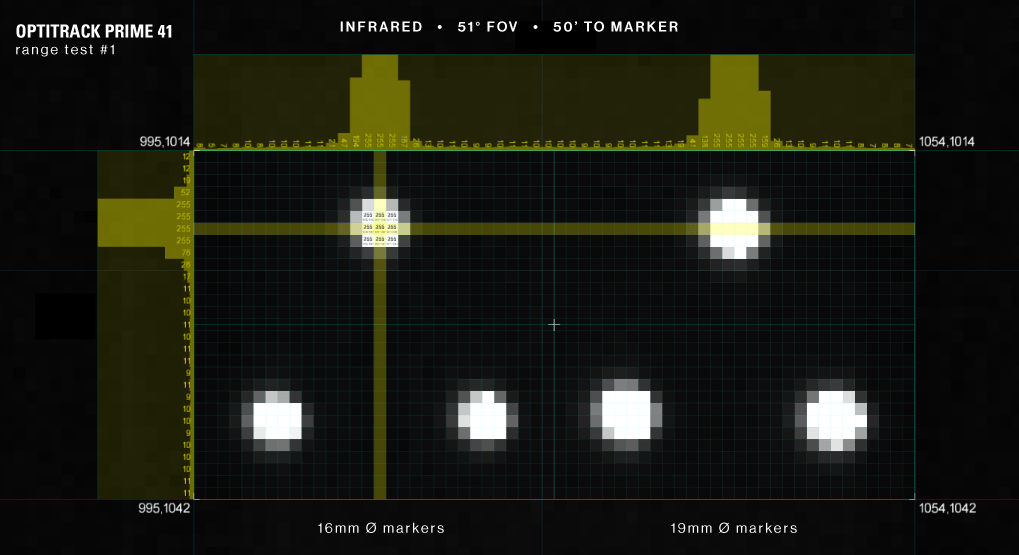
ผลต่อความแม่นยำ: กล้องที่มีความละเอียดสูงกว่ามีความเชื่อมโยงชัดเจนกับความแม่นยำที่มากกว่าในระบบจับภาพเคลื่อนไหว ตัวอย่างเช่น ระบบที่ติดตั้งกล้อง 12 ล้านพิกเซลสามารถจับภาพข้อมูลด้วยความแม่นยำสูงกว่ากล้อง 1.3 ล้านพิกเซล โดยมีสมมติฐานว่าตัวแปรทางสิ่งแวดล้อมและระบบอื่น ๆ ทั้งหมดเหมือนกัน ซึ่งเป็นเพราะกล้องความละเอียดสูงจับภาพมาร์กเกอร์สะท้อนแสงด้วยจำนวนพิกเซลที่มากขึ้น ทำให้รูปร่างของพิกเซลเป็นวงกลมมากขึ้นและทำให้การระบุจุดศูนย์กลางได้อย่างแม่นยำยิ่งขึ้น กล้องที่มีความละเอียดสูงกว่าสามารถคำนวณจุดศูนย์กลางของมาร์กเกอร์ (Centroid) ได้อย่างแม่นยำมากขึ้นในระยะทางเท่ากัน และสามารถติดตามมาร์กเกอร์ขนาดเดียวกันในระยะที่ไกลกว่าด้วย ในทางกลับกัน ความละเอียดที่ต่ำกว่าอาจทำให้เกิดข้อผิดพลาดที่ใหญ่ขึ้น เนื่องจากมีพิกเซลน้อยลงในการคำนวณจุดศูนย์กลางของมาร์กเกอร์ ระบบ Optical MoCap เป็นที่รู้จักกันดีในด้านความแม่นยำสูง สามารถให้ข้อมูลที่มีความละเอียดระดับต่ำกว่ามิลลิเมตร (โดยทั่วไป 0.3–1 มม.) ในสภาพแวดล้อมที่ควบคุมได้ คุณภาพของข้อมูล Kinematics จะดีขึ้นด้วยกล้องที่มีความละเอียดสูงขึ้น
อัตราส่วนพิกเซลต่อมิลลิเมตร: ระบบออปติคัลมักสร้างข้อผิดพลาด Root Mean Square (RMS) น้อยกว่าหรือเท่ากับ 2.0 มม. สำหรับมาร์กเกอร์ที่เคลื่อนไหว และน้อยกว่าหรือเท่ากับ 1.0 มม. สำหรับมาร์กเกอร์ที่อยู่กับที่ ซึ่งถือว่าเป็นมาตรฐานความแม่นยำที่ยอดเยี่ยมในระดับ "Gold Standard" จำนวนพิกเซลที่เห็นในมาร์กเกอร์จะลดลงแบบเอกซ์โปเนนเชียลเมื่อระยะเพิ่มขึ้น โดยต้องมีอย่างน้อย 4 พิกเซลจึงจะสามารถตรวจจับมาร์กเกอร์ได้ (ในผู้ผลิตบางรายอนุญาตให้ผู้ใช้ลดจำนวนพิกเซลที่ตรวจจับมาร์กเกอร์ลงได้ต่ำกว่า 4 พิกเซล)
ความละเอียดกับอัตราการจับภาพ: ความละเอียดเชิงพื้นที่และความละเอียดเชิงเวลา (อัตราการจับภาพ) มีความสัมพันธ์กัน การได้มาซึ่งละเอียดเชิงพื้นที่ที่สูงขึ้น (พิกเซลต่อภาพมากขึ้น) จะไปจำกัดความละเอียดเชิงเวลาสูงสุดที่ทำได้ (เฟรมต่อวินาที) เนื่องจากข้อจำกัดด้านปริมาณข้อมูล นี่คือข้อจำกัดภายในเซ็นเซอร์ของกล้องและขั้นตอนการประมวลผลภายในระบบ เมื่อแต่ละเฟรมมีข้อมูลพิกเซลมากขึ้นอย่างมีนัยสำคัญ จำนวนเฟรมที่มีข้อมูลมากเหล่านี้จะทำให้ความสามารถในการประมวลผลและความสามารถในการส่งข้อมูลต่อวินาทีลดลง ทำให้เกิดความสัมพันธ์แบบผกผันโดยตรง ผู้ผลิตแต่ละรายจึงต้องแข่งขันกันพัฒนาทั้งเซ็นเซอร์และระบบประมวลผลเพื่อเพิ่มประสิทธิภาพในการทำงาน
3. อัตราการจับภาพ: การจับภาพการเคลื่อนไหวที่รวดเร็วและซับซ้อน
อัตราการจับภาพ (Frame Rate หรือ FPS, Hz) คือจำนวนภาพที่กล้องจับได้ต่อวินาที ซึ่งเป็นตัววัดความละเอียดเชิงเวลา และมีความสำคัญอย่างยิ่งต่อความสามารถในการจับภาพการเคลื่อนไหวที่รวดเร็วและซับซ้อน
อัตราการจับภาพที่สูงขึ้นจะแปลโดยตรงไปสู่จำนวนภาพที่จับได้ต่อวินาทีที่มากขึ้น ส่งผลให้การเคลื่อนไหวในวิดีโอที่บันทึกไว้มีความราบรื่นและสมจริงยิ่งขึ้น ความหนาแน่นของการสุ่มตัวอย่างที่เพิ่มขึ้นนี้มีความสำคัญต่อการจับความเปลี่ยนแปลงในรายละเอียดของการเคลื่อนไหวที่รวดเร็ว อัตราการจับภาพที่สูงขึ้นและเวลาแฝง (Latency) ที่ต่ำลงจะช่วยลดข้อผิดพลาดในการติดตามการเคลื่อนที่ของวัตถุ และมีประโยชน์ในการประมาณความเร็ว ความเร่ง และเส้นทางการเคลื่อนที่ของวัตถุได้อย่างแม่นยำมากยิ่งขึ้น
สำหรับการวิเคราะห์ทางชีวกลศาสตร์อย่างจริงจัง โดยเฉพาะอย่างยิ่งการเคลื่อนไหวของร่างกายที่รวดเร็วหรือกิจกรรมที่มีเวลาสัมผัสพื้นสั้นๆ อัตราการจับภาพที่มากกว่า 100 fps มักเป็นข้อแนะนำในเบื้องต้น สำหรับการเคลื่อนไหวที่รวดเร็วและซับซ้อน เช่น การวิ่งด้วยความเร็ว อัตราการจับภาพที่เหมาะสมที่สุดคือ 240-250 fps ซึ่งจำเป็นต่อการได้ความแม่นยำในการจับภาพทุก 0.004 วินาที การเคลื่อนไหวที่รวดเร็วมาก เช่น การขว้างเบสบอล หรือการโยนลูกคริกเก็ต ผู้ใช้มักจะกำหนดอัตราการจับภาพสูงถึง 250 FPS สำหรับการเคลื่อนไหวที่รวดเร็วมากกว่านั้น เช่น การวิเคราะห์วงสวิงกอล์ฟ อัตราการจับภาพ 500 Hz หรือสูงกว่ามักถูกนำมาใช้ เพื่อการจับภาพที่แม่นยำ (Pueo, B & Jimenez-Olmedo, J M, 2017) สำหรับงาน Gait Analysis อัตราการจับภาพที่นิยมใช้ คือ 100 Hz (40%), 120 Hz (9%), 200 Hz (10%) (Abdullah, M. et al, 2024)
ภาพเบลอจากการเคลื่อนที่ (Motion Blur) และการป้องกันความสับสนของมาร์กเกอร์: อัตราการจับภาพที่สูงพอเป็นสิ่งจำเป็นเพื่อหลีกเลี่ยงภาพเบลอจากการเคลื่อนที่ โดยเฉพาะในการเคลื่อนไหวที่รวดเร็ว ภาพเบลอเป็นตัวบ่งชี้ว่าอัตราเฟรมไม่เพียงพอ (ในบางกรณีก็เกิดจากความเร็วชัตเตอร์ที่กำหนดไว้ไม่เร็วพอ) นอกจากนี้ อัตราการจับภาพที่สูงขึ้นยังมีความจำเป็นเพื่อป้องกันความสับสนของการระบุมาร์กเกอร์ (Marker Identity Confusion) ซึ่งจะซับซ้อนมากขึ้นเมื่อความเร็วของการเคลื่อนที่เพิ่มขึ้น ทำให้ต้องใช้อัตราเฟรมที่สูงขึ้นเพื่อหลีกเลี่ยงความผิดพลาดในการติดตามหรือการหลุดหายไป
ทฤษฎีการสุ่มตัวอย่างของ Nyquist-Shannon เป็นหลักการสำคัญที่ระบุว่าสัญญาณต่อเนื่องต้องถูกสุ่มตัวอย่างด้วยอัตราที่มากกว่าสองเท่าของส่วนประกอบความถี่สูงสุดของสัญญาณ เพื่อป้องกันการบิดเบือนที่เรียกว่า Aliasing หากอัตราการสุ่มตัวอย่างต่ำเกินไป อาจส่งผลให้เกิด aliasing ทำให้การเคลื่อนไหวที่มีความถี่สูงถูกแสดงผิดพลาดเป็นความถี่ที่ต่ำกว่าและไม่ถูกต้อง อย่างไรก็ตาม การกำหนดอัตราการจับภาพที่สูงเกินไปนำมาซึ่งปัญหาหลายประการ เช่น ขนาดไฟล์ข้อมูลที่ใหญ่ขึ้นอย่างมาก ความต้องการพื้นที่จัดเก็บที่เพิ่มขึ้น และมักจำเป็นต้องใช้ความแรงของแสงที่มากกว่าเดิมเพื่อให้แน่ใจว่ามาร์กเกอร์ได้รับแสงที่เพียงพอ
4. การวางแผนการจัดวางกล้อง: ประเด็นสำคัญเพื่อการจับภาพการเคลื่อนไหวที่ดีกว่า
การจัดวางกล้องในระบบ Optical MoCap อย่างเหมาะสมนั้นมีความสำคัญอย่างมากไม่แพ้จำนวนกล้องที่ใช้ การจัดวางกล้องที่ไม่ดีพอ แม้จะมีกล้องจำนวนมาก ก็อาจส่งผลให้คุณภาพของข้อมูล ทำให้ข้อมูลที่มีคุณภาพไม่น่าพอใจและลดทอนประสิทธิภาพของระบบได้
ระบบจับภาพการเคลื่อนไหวแบบออปติคอลอาศัยการประมาณค่าตำแหน่ง 3 มิติของมาร์กเกอร์โดยใช้เทคนิคการคำนวณแบบสามเหลี่ยมจากกล้องหลายตัว ประสิทธิภาพของระบบนี้ขึ้นอยู่กับการมองเห็นมาร์กเกอร์จากกล้องอย่างน้อยสองตัว และความแม่นยำของการสร้างภาพสามเหลี่ยม ปัญหาหลักที่ส่งผลต่อคุณภาพการประมาณค่า 3 มิติและการติดตามคือการบดบังมาร์กเกอร์ (marker occlusion) ซึ่งเกิดขึ้นเมื่อส่วนต่างๆ ของร่างกายหรือวัตถุอื่น ๆ บดบังมาร์กเกอร์จากมุมมองของกล้อง มีการทดลองที่เสนอวิธีการวางตำแหน่งกล้องแบบอัตโนมัติเพื่อเพิ่มการมองเห็นจุดเป้าหมายสูงสุดและลดข้อผิดพลาดในการสร้างภาพ 3 มิติให้เหลือน้อยที่สุด โดยเฉพาะในสภาวะที่มีการบดบังจากการเคลื่อนไหวของร่างกาย ตัวแปรเชิงคุณภาพที่นำเสนอจะคำนวณจากโมเดลความน่าจะเป็นของการมองเห็นจุดเป้าหมายจากกล้องที่มี "มุมมองที่ดี" โดยพิจารณาถึงข้อผิดพลาดในการสร้าง 3 มิติ การลดทอนความละเอียดเนื่องจากระยะห่างจากกล้อง และการบดบังจากการเคลื่อนไหวของร่างกาย ตัวแปรเชิงคุณภาพจะพิจารณา "ผลรวมของมุมการบดบังทั้งหมด" (sum of occluder orientations) ซึ่งเป็นมุมที่จุดเป้าหมายไม่สามารถมองเห็นได้จากกล้องอย่างน้อยสองตัวที่จะสามารถสร้างการคำนวณแบบสามเหลี่ยมได้อย่างแม่นยำ ยิ่งมุมรวมนี้น้อยเท่าใด การจัดวางกล้องก็ยิ่งมีประสิทธิภาพในการลดการบดบังมากขึ้น เพื่อให้การสร้างภาพสามเหลี่ยมมีความแม่นยำ จุดเป้าหมายควรถูกมองเห็นโดยกล้องสองตัวที่มีมุมการบรรจบกัน (convergence angle) อยู่ในช่วง 40-140 องศา ผลการทดลองแสดงให้เห็นว่า การจัดวางกล้องที่เหมาะสมสามารถปรับปรุงประสิทธิภาพในการจับภาพมาร์กเกอร์ได้อย่างมีนัยสำคัญ ตัวอย่างเช่น การจัดวางตามวิธีการที่นำเสนอสามารถระบุมาร์กเกอร์ทั้ง 37 ตัวได้ถึง 86% ของเฟรม ซึ่งดีกว่าการจัดวางแบบเดิม (70%) และแบบสุ่ม (30%) อย่างชัดเจน (Rahimian, P & Kearney, J. K., 2015)
มุมมองและระดับความสูง: ประสิทธิภาพที่ดีของระบบขึ้นอยู่กับการมองเห็นจุดจากกล้องอย่างน้อยสองตัวและความแม่นยำของการคำนวณแบบสามเหลี่ยม ซึ่งมีความสัมพันธ์อย่างยิ่งกับตำแหน่งและการวางแนวของกล้อง การคำนวณแบบสามเหลี่ยมที่ทำได้ไม่ดีอาจเกิดจากกล้องที่ทำมุมเกือบขนานกัน กล้องควรถูกกระจายอย่างเหมาะสมทั่วปริมาตรการจับภาพ เพื่อให้มั่นใจว่ามีมุมกว้างสำหรับอัลกอริทึมการคำนวณสามเหลี่ยม ซึ่งจะช่วยเพิ่มคุณภาพและความแม่นยำในการติดตามมาร์กเกอร์โดยตรง นอกจากนี้ การวางกล้องที่ระดับความสูงที่แตกต่างกันจะช่วยเพิ่มมุมมองที่หลากหลายมากขึ้น ซึ่งจะช่วยเพิ่มการครอบคลุมโดยรวมของปริมาตรและลดการบดบังของมาร์กเกอร์ได้อย่างมีนัยสำคัญ
การจัดวางเพื่อลดการบดบัง: หลักการสำคัญคือการจัดวางกล้องเพื่อลดการบดบัง สำหรับการติดตามร่างกายเต็มรูปแบบที่ครอบคลุม การจัดเรียงกล้องรอบนอกปริมาตรการจับภาพเป็นประโยชน์อย่างยิ่ง เพื่อให้มั่นใจว่ามองเห็นมาร์กเกอร์ทั้งด้านหน้าและด้านหลังของวัตถุ กล้องควรถูกจัดวางในลักษณะที่ลดการบดบังและเพิ่มการมองเห็นมาร์กเกอร์ให้เหมาะสมที่สุด
ระยะห่างที่เหมาะสม: ระยะห่างระหว่างกล้องควรสอดคล้องกัน และควรหลีกเลี่ยงการรวมกลุ่มกล้องที่ใกล้กันเกินไป การอยู่ใกล้กันมากเกินไปจะส่งผลให้ภาพที่ได้คล้ายกันมาก ซึ่งลดประโยชน์ของจำนวนกล้องที่สูงขึ้น และเพิ่มภาระการคำนวณสำหรับการปรับเทียบระบบโดยไม่จำเป็น
ระยะห่างจากวัตถุ: ระยะห่างระหว่างกล้องกับวัตถุยังมีบทบาทในความแม่นยำ ระยะทางที่สั้นกว่าช่วยให้กล้องจับภาพพิกเซลต่อมาร์กเกอร์ได้มากขึ้น ซึ่งนำไปสู่ความแม่นยำที่สูงขึ้นสำหรับการเปลี่ยนแปลงเล็กน้อย ในขณะที่ระยะทางที่ยาวกว่าให้การครอบคลุมที่กว้างขึ้นซึ่งเหมาะสำหรับปริมาตรการจับภาพขนาดใหญ่
อ้างอิง
Rahimian, P., & Kearney, J. (2015, November). Optimal camera placement for motion capture systems in the presence of dynamic occlusion. In Proceedings of the 21st ACM Symposium on Virtual Reality Software and Technology (pp. 129-138).
Abdullah, M., Hulleck, A. A., Katmah, R., Khalaf, K., & El-Rich, M. (2024). Multibody dynamics-based musculoskeletal modeling for gait analysis: a systematic review. Journal of neuroengineering and rehabilitation, 21(1), 178.
Pueo, B., & Jimenez-Olmedo, J. M. (2017). Application of motion capture technology for sport performance analysis (El uso de la tecnología de captura de movimiento para el análisis del rendimiento deportivo). Retos, 32, 241-247.