

Motion Capture Systems 101
TL;DR: Motion Capture (MoCap) คือเทคโนโลยีสำคัญที่ใช้บันทึกการเคลื่อนไหวของมนุษย์หรือวัตถุเข้าสู่รูปแบบดิจิทัล เพื่อสร้างแอนิเมชันที่สมจริงและวิเคราะห์เชิงลึก โดยมีวิวัฒนาการมาอย่างยาวนานตั้งแต่ช่วงต้นศตวรรษที่ 20 จนถึงปัจจุบัน ระบบ MoCap แบ่งออกเป็นหลายประเภท ได้แก่ Marker-based Optical ที่เน้นความแม่นยำสูงสุด (Gold Standard) ด้วยการติดตามมาร์กเกอร์, Markerless ที่ใช้ AI และกล้องทั่วไปหรือกล้องระดับมืออาชีพเพื่อการติดตามที่แบบรบกวนการเคลื่อนไหว, IMU-based ที่ใช้เซนเซอร์วัดแรงเฉื่อยเพื่อความคล่องตัวในการใช้งานนอกห้องแลป, Electromagnetic ที่ใช้สนามแม่เหล็กไฟฟ้าในการติดตาม, Mechanical ที่ใช้โครงสร้างเชิงกลในการวัดมุมข้อต่อ, และ Hybrid ซึ่งเป็นการผสมผสานเทคนิคต่างๆ เพื่อเสริมจุดแข็งและลดข้อจำกัดของระบบเดี่ยวๆ เทคโนโลยี MoCap นี้มีการประยุกต์ใช้อย่างกว้างขวางในหลากหลายสาขา ตั้งแต่อุตสาหกรรมบันเทิง กีฬา การแพทย์ การยศาสตร์ ไปจนถึงงานวิจัย
MOTION CAPTURE SYSTEM
RAT
7/5/2025
เทคโนโลยี Motion Capture (การจับภาพเคลื่อนไหว): บันทึกทุกการเคลื่อนไหวสู่โลกดิจิทัล
Motion Capture (การจับภาพเคลื่อนไหว หรือ MoCap) คือกระบวนการบันทึกการเคลื่อนที่ของวัตถุหรือมนุษย์ด้วยความละเอียดสูงเข้าสู่ระบบคอมพิวเตอร์ เพื่อสร้างแอนิเมชันที่สมจริงและวิเคราะห์การเคลื่อนไหวได้อย่างแม่นยำ เทคโนโลยีนี้ทำหน้าที่แปลงการเคลื่อนไหวทางกายภาพให้เป็นข้อมูลดิจิทัล ซึ่งโดยทั่วไปจะบันทึกตำแหน่งของร่างกายและมุมข้อต่อ ณ ช่วงเวลาต่างๆ ข้อมูลที่ได้สามารถนำไปขับเคลื่อนตัวละครเสมือนจริง ควบคุมเอฟเฟกต์ภาพ เสียง สภาพแวดล้อมเสมือนจริง หรือแม้กระทั่งสิ่งของในสภาพแวดล้อมทางกายภาพ
เทคโนโลยี MoCap มีวิวัฒนาการมาอย่างยาวนานตั้งแต่ช่วงต้นศตวรรษที่ 20 โดยมีผู้บุกเบิกอย่าง Étienne-Jules Marey และ Eadweard Muybridge ที่พยายามทำความเข้าใจการเคลื่อนไหวของม้าแข่ง ระบบ MoCap แรกสุดถูกพัฒนาโดย Lee Harrison III ในช่วงต้นทศวรรษ 1960 และระบบ Optical Motion Capture ที่ใช้กล้องและมาร์กเกอร์สะท้อนแสงก็เกิดขึ้นในทศวรรษ 1980 ตามมาด้วยระบบ Magnetic ในทศวรรษ 1990 และระบบ Inertial ในช่วงต้นทศวรรษ 2000 สำหรับเทคโนโลยี Markerless ที่เราเห็นในปัจจุบันนั้นมีต้นกำเนิดประมาณ 25 ปีที่แล้ว และเริ่มใช้งานอย่างแพร่หลายในช่วง 5-6 ปีที่ผ่านมา
ประเภทของเทคโนโลยี Motion Capture (MoCap)
MoCap สามารถแบ่งออกเป็นหลายประเภทหลัก ซึ่งแต่ละประเภทมีหลักการทำงาน จุดเด่น และข้อจำกัดที่แตกต่างกัน
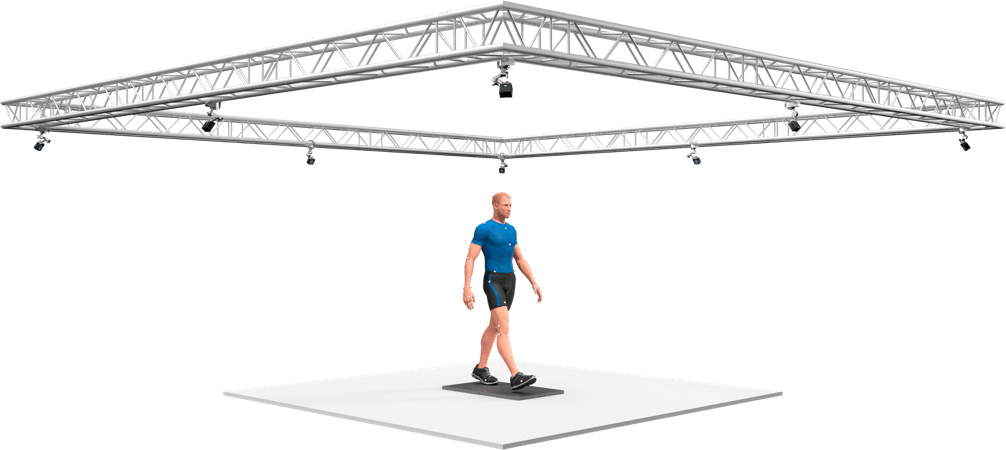
1. ระบบกล้องแบบใช้มาร์กเกอร์ (Marker-based Optical Systems)
หลักการทำงาน: ระบบนี้ใช้ กล้องความเร็วสูงหลายตัว ในการจับภาพ มาร์กเกอร์ (จุดสะท้อนแสงหรือเปล่งแสง) ที่ติดอยู่บนตำแหน่งทางกายวิภาคที่สำคัญของร่างกาย กล้องจะเปล่งแสงอินฟราเรดเพื่อให้เกิดการสะท้อนกลับจากมาร์กเกอร์ จากนั้นจึงรับภาพสะท้อนและคำนวณตำแหน่ง 3 มิติของมาร์กเกอร์แต่ละตัวได้อย่างแม่นยำสูงถึงระดับต่ำกว่ามิลลิเมตร ข้อมูลที่ได้จะนำมาสร้างเป็นโมเดลการเคลื่อนไหวเพื่อวิเคราะห์ค่าทางชีวกลศาสตร์ เช่น มุมข้อต่อหรือความเร็ว
จุดเด่น: ถือเป็น "มาตรฐานทองคำ" (gold standard) สำหรับการวิเคราะห์การเคลื่อนไหวของมนุษย์และงานวิจัยชีวกลศาสตร์ เนื่องจากให้ความแม่นยำในการระบุตำแหน่งมาร์กเกอร์สูงมาก เหมาะอย่างยิ่งสำหรับงานวิจัยทางการแพทย์และการกีฬาที่ต้องการความละเอียดแม่นยำสูงสุด เช่น การวิเคราะห์กลไกการเดินที่ซับซ้อนในผู้ป่วย หรือการศึกษาท่าทางนักกีฬาเพื่อเพิ่มประสิทธิภาพ
ข้อจำกัด: ราคาสูงมาก ต้องใช้พื้นที่เฉพาะและสภาพแวดล้อมที่ควบคุม และใช้เวลานานในการตั้งค่าและติดมาร์กเกอร์ นอกจากนี้ยังอาจเกิดปัญหาการบดบังมาร์กเกอร์ (occlusion) หากมีสิ่งกีดขวางหรือส่วนของร่างกายบดบัง
2. ระบบกล้องแบบไร้มาร์กเกอร์ (Markerless Optical Systems)
หลักการทำงาน: ระบบ Markerless สามารถทำงานได้กับกล้องหลายประเภท ตั้งแต่กล้องวิดีโอมาตรฐานทั่วไปราคาเข้าถึงง่าย ไปจนถึง กล้อง Optical ความเร็วสูงระดับมืออาชีพ ซึ่งเป็นระบบเดียวกับที่ใช้ใน Marker-based MoCap กล้องเหล่านี้จะบันทึกภาพวิดีโอของผู้ถูกบันทึก และส่งข้อมูลเข้าสู่ซอฟต์แวร์ที่ใช้อัลกอริทึม Deep Learning และเทคโนโลยีประมวลผลภาพจากกล้อง (pose estimation) เพื่อระบุตำแหน่งและทิศทางของส่วนต่างๆ ของร่างกาย (pose) โดยไม่จำเป็นต้องติดมาร์กเกอร์หรือสวมชุดพิเศษ
จุดเด่น: ไม่รบกวนการเคลื่อนไหว ตั้งค่าได้รวดเร็วและใช้งานได้หลากหลายกว่า รวมถึงกำจัดความจำเป็นในการสวมชุดพิเศษ นอกจากนี้ยังมีต้นทุนที่หลากหลาย ตั้งแต่ระบบราคาเข้าถึงง่ายไปจนถึงระบบมืออาชีพที่ให้ความแม่นยำสูง และสามารถรองรับหลายคนพร้อมกัน โดดเด่นในการประยุกต์ใช้ในสภาพแวดล้อมจริง เช่น สนามกีฬาเพื่อวิเคราะห์ท่าทางการเล่นกีฬา หรือการประเมินการเคลื่อนไหวในคลินิกโดยไม่รบกวนผู้ป่วย
ข้อจำกัด: อาจมีปัญหาในการติดตามวัตถุขนาดเล็กหรือการแสดงออกทางสีหน้าอย่างแม่นยำ ยังคงมีปัญหาการบดบัง (occlusion) และการประมาณความลึกในระบบกล้องเดี่ยว ปัจจัยแวดล้อม เช่น สภาพแสงหรือแสงแดดโดยตรงอาจส่งผลต่อความแม่นยำ และยังต้องพัฒนาเพื่อให้ได้ความแม่นยำเทียบเท่าระบบที่ใช้มาร์กเกอร์ในบางบริบท
3. ระบบที่ใช้เซนเซอร์วัดแรงเฉื่อย (IMU-based Systems)
หลักการทำงาน: ระบบนี้ใช้ Inertial Measurement Units (IMUs) ซึ่งประกอบด้วยเซ็นเซอร์วัดความเร่ง (accelerometers), ไจโรสโคป (gyroscopes) และบางครั้งก็มีเซ็นเซอร์วัดสนามแม่เหล็ก (magnetometers) เซ็นเซอร์เหล่านี้จะติดอยู่ตามส่วนต่างๆ ของร่างกายและส่งข้อมูลไร้สายไปยังคอมพิวเตอร์ เพื่อคำนวณตำแหน่งและทิศทางของแต่ละส่วนของร่างกายแบบเรียลไทม์
จุดเด่น: พกพาได้สะดวก สามารถตั้งค่าและใช้งานได้ง่าย ไม่ต้องกังวลเรื่องการบดบังเซนเซอร์ (line-of-sight problems) สามารถเก็บข้อมูลในสภาพแวดล้อมที่หลากหลาย รวมถึงกลางแจ้ง ทำงานได้ดีโดยไม่ต้องคำนึงถึงสภาพแสง และมักมีราคาถูกกว่าระบบที่ใช้กล้อง เหมาะสำหรับการเก็บข้อมูลในสภาพแวดล้อมภาคสนาม เช่น การวิเคราะห์ท่าวิ่งของนักกีฬาขณะฝึกซ้อมกลางแจ้ง หรือการติดตามการเคลื่อนไหวของผู้ป่วยในชีวิตประจำวันเพื่อการฟื้นฟู
ข้อจำกัด: โดยทั่วไปมีความแม่นยำน้อยกว่าระบบ Optical โดยเฉพาะเมื่อใช้เป็นเวลานาน (ผลของ Sensor Drift ทำให้เกิดข้อผิดพลาดสะสม) และอาจได้รับผลกระทบจากการรบกวนของสนามแม่เหล็กไฟฟ้า นอกจากนี้ยังอาจมีปัญหาในการจับการเคลื่อนไหวที่รวดเร็วมากๆ
4. ระบบแม่เหล็กไฟฟ้า (Electromagnetic Systems)
หลักการทำงาน: ระบบนี้ใช้สนามแม่เหล็กไฟฟ้าในการติดตามการเคลื่อนที่ ผู้เข้าร่วมจะสวมเซนเซอร์รับสัญญาณแม่เหล็กไฟฟ้า ซึ่งรับคลื่นจากตัวสร้างสนามแม่เหล็ก เพื่อกำหนดตำแหน่งและทิศทางของร่างกาย เซนเซอร์จะตรวจจับความแรงและทิศทางของสนามแม่เหล็กที่สร้างโดยตัวสร้างสนามแม่เหล็ก เพื่อคำนวณตำแหน่งและทิศทางของเซนเซอร์ในพื้นที่ 3 มิติ
จุดเด่น: ไม่มีปัญหาเรื่องการบดบัง (line-of-sight problems) เหมือนระบบ Optical ทำให้สามารถบันทึกการเคลื่อนไหวในพื้นที่ที่ซับซ้อนได้ดี สามารถวัดตำแหน่งและทิศทางการหมุนได้อย่างแม่นยำในพื้นที่ขนาดเล็ก และทำงานได้แบบเรียลไทม์ นิยมใช้ในงานที่ต้องการการติดตามการเคลื่อนที่ในพื้นที่จำกัด เช่น การเคลื่อนไหวของข้อนิ้วมือ หรือการติดตามอุปกรณ์ขนาดเล็กในการผ่าตัดจำลอง (simulation)
ข้อจำกัด: ความแม่นยำจะลดลงอย่างมากเมื่อมีวัตถุโลหะ หรืออุปกรณ์อิเล็กทรอนิกส์อื่นๆ ในสภาพแวดล้อม เนื่องจากโลหะจะรบกวนสนามแม่เหล็กไฟฟ้าที่ใช้ในการติดตาม ทำให้ข้อมูลคลาดเคลื่อน นอกจากนี้อัตราการสุ่มข้อมูล (sampling rate) มักต่ำเกินไปสำหรับการจับการเคลื่อนไหวที่รวดเร็วและซับซ้อน และคุณภาพข้อมูลโดยรวมมักไม่ดีเท่าระบบ Optical
5. ระบบเชิงกล (Mechanical Systems)
หลักการทำงาน: ระบบนี้ประกอบด้วยโครงสร้างแข็งที่ติดเซนเซอร์วัดมุม (เช่น encoders) ไว้ตามข้อต่อของร่างกาย (คล้ายโครงกระดูกภายนอก) ซึ่งเคลื่อนที่ไปพร้อมกับการเคลื่อนไหวของบุคคล เพื่อวัดการเปลี่ยนแปลงของมุมข้อต่อต่างๆ ข้อมูลที่ได้จะถูกส่งไปยังคอมพิวเตอร์เพื่อสร้างแบบจำลองการเคลื่อนไหว
จุดเด่น: ไม่มีการรบกวนจากแสงหรือสนามแม่เหล็กไฟฟ้าเหมือนระบบอื่น ๆ สามารถทำงานได้แบบเรียลไทม์ และมีราคาที่เข้าถึงได้มากกว่าระบบ Optical บางประเภท เหมาะสำหรับงานที่เน้นการวัดมุมข้อต่อโดยตรงในสภาพแวดล้อมที่ควบคุม เช่น การวิเคราะห์ท่าทางการเดินหรือการเคลื่อนไหวของแขนขาเพื่อวัตถุประสงค์ทางคลินิกที่ต้องการความแม่นยำสูงในเชิงมุม
ข้อจำกัด: โครงสร้างที่สวมใส่อาจมีขนาดใหญ่และหนัก ทำให้ขัดขวางการเคลื่อนไหวตามธรรมชาติของบุคคล จำกัด Degrees of Freedom (DoF) ของการเคลื่อนไหว และไม่สามารถตรวจจับระยะสูงจากพื้นได้ (เช่น การกระโดด) อุปกรณ์อาจต้องมีการปรับเทียบ (calibration) บ่อยครั้งเพื่อรักษาความแม่นยำ
6. ระบบผสมผสาน (Hybrid Systems)
หลักการทำงาน: เป็นการรวมเทคนิคการเก็บข้อมูลหลายอย่างเข้าด้วยกัน เพื่อชดเชยข้อจำกัดของแต่ละวิธีและเสริมสร้างจุดแข็งร่วมกัน ตัวอย่างเช่น การรวมเซนเซอร์วัดแรงเฉื่อย (IMUs) เข้ากับเซนเซอร์สนามแม่เหล็กไฟฟ้า (Electromagnetic Field - EMF) เพื่อให้ได้ข้อมูลตำแหน่งสัมบูรณ์ที่แม่นยำและลดปัญหา Sensor Drift ของ IMUs ในระยะยาว หรือการรวมกล้อง Optical (ทั้งแบบ Marker-based หรือ Markerless) เข้ากับเซนเซอร์ IMU เพื่อใช้ประโยชน์จากความแม่นยำเชิงตำแหน่งของกล้องและความสามารถในการติดตามในพื้นที่กว้างโดยไม่มีปัญหา Occlusion ของ IMU
จุดเด่น: ให้ความแม่นยำสูงขึ้น และปรับตัวเข้ากับสภาพแวดล้อมที่หลากหลายได้ดีกว่าระบบเดี่ยวๆ สามารถลดข้อจำกัดเฉพาะของแต่ละเทคโนโลยีได้ เช่น การรวม IMU กับเซนเซอร์ EMF สามารถให้การติดตามตำแหน่งแบบไม่มี Drift ที่มีความแม่นยำเทียบเท่าระบบ Optical โดยไม่จำเป็นต้องใช้กล้อง เหมาะสมอย่างยิ่งสำหรับงานที่ต้องการข้อมูลที่ครอบคลุมและแม่นยำสูงในสภาพแวดล้อมที่หลากหลาย เช่น การวิเคราะห์การเคลื่อนไหวที่ซับซ้อนในพื้นที่กว้าง หรือการพัฒนา VR/AR ที่ต้องการการตอบสนองที่ไร้รอยต่อ
ข้อจำกัด: ความซับซ้อนในการติดตั้งและประมวลผลข้อมูลจะสูงกว่าระบบเดี่ยวๆ เนื่องจากต้องจัดการข้อมูลจากแหล่งที่มาหลายประเภท และจำเป็นต้องมีการซิงโครไนซ์ข้อมูลที่ดี
การประยุกต์ใช้ Motion Capture (MoCap) ในหลากหลายสาขา
เทคโนโลยี MoCap ถูกนำไปประยุกต์ใช้ในหลากหลายอุตสาหกรรมและสาขาวิชา
อุตสาหกรรมบันเทิง, การศึกษา และการอนุรักษ์วัฒนธรรม: ใช้สร้างแอนิเมชันที่สมจริงและเทคนิคพิเศษในภาพยนตร์และวิดีโอเกม (เช่น การสร้างตัวละครดิจิทัล 2 มิติ หรือ 3 มิติ และตัวละครที่มีชีวิตชีวาอย่างกอลลัมหรือ King Kong) นอกจากนี้ยังใช้ในการวิเคราะห์ บันทึก และจัดทำเอกสารการเคลื่อนไหวในการแสดงสด รวมถึงการสอน สาธิต และสร้างท่าทางการร่ายรำต่างๆ (เช่น การอนุรักษ์ศิลปะกระบี่กระบองของไทย)
วิทยาศาสตร์การกีฬา: ช่วยวิเคราะห์ท่าทาง เทคนิค และพัฒนาประสิทธิภาพของนักกีฬาอย่างละเอียด รวมถึงการป้องกันการบาดเจ็บและติดตามความก้าวหน้าในการฟื้นฟูหลังการบาดเจ็บ
การแพทย์และการฟื้นฟูสมรรถภาพ: ใช้ในการวินิจฉัยและติดตามโรคทางระบบกล้ามเนื้อและกระดูก ประเมินสมรรถภาพการเคลื่อนไหว วิเคราะห์ความผิดปกติของการเดิน ท่าทาง และโรคทางระบบประสาท รวมถึงเป็นเครื่องมือสำคัญในการบำบัดทางกายภาพและการฟื้นฟูสมรรถภาพที่บ้าน
การยศาสตร์และความปลอดภัยในที่ทำงาน: ช่วยวิเคราะห์การเคลื่อนไหวของมนุษย์เพื่อระบุความเสี่ยงต่างๆ เช่น การเคลื่อนไหวซ้ำๆ หรือท่าทางที่ไม่เหมาะสม เพื่อปรับปรุงการออกแบบสถานที่ทำงานและกระบวนการ
การวิจัยและพัฒนา: ใช้ในงานวิจัยทางชีวกลศาสตร์ การศึกษาการเคลื่อนไหวของมนุษย์ และการสร้างปฏิสัมพันธ์ระหว่างมนุษย์กับคอมพิวเตอร์ นอกจากนี้ยังมีการประยุกต์ใช้ในด้านหุ่นยนต์และยานยนต์
บทความนี้ให้ภาพรวมของเทคโนโลยี Motion Capture (MoCap) และการประยุกต์ใช้ในปัจจุบัน ผู้อ่านสามารถนำข้อมูลเหล่านี้ไปเป็นพื้นฐานในการศึกษาเจาะลึกเทคโนโลยีแต่ละประเภท และพิจารณาเลือกใช้ให้เหมาะสมกับความต้องการเฉพาะทางต่อไป